
Описание продукта
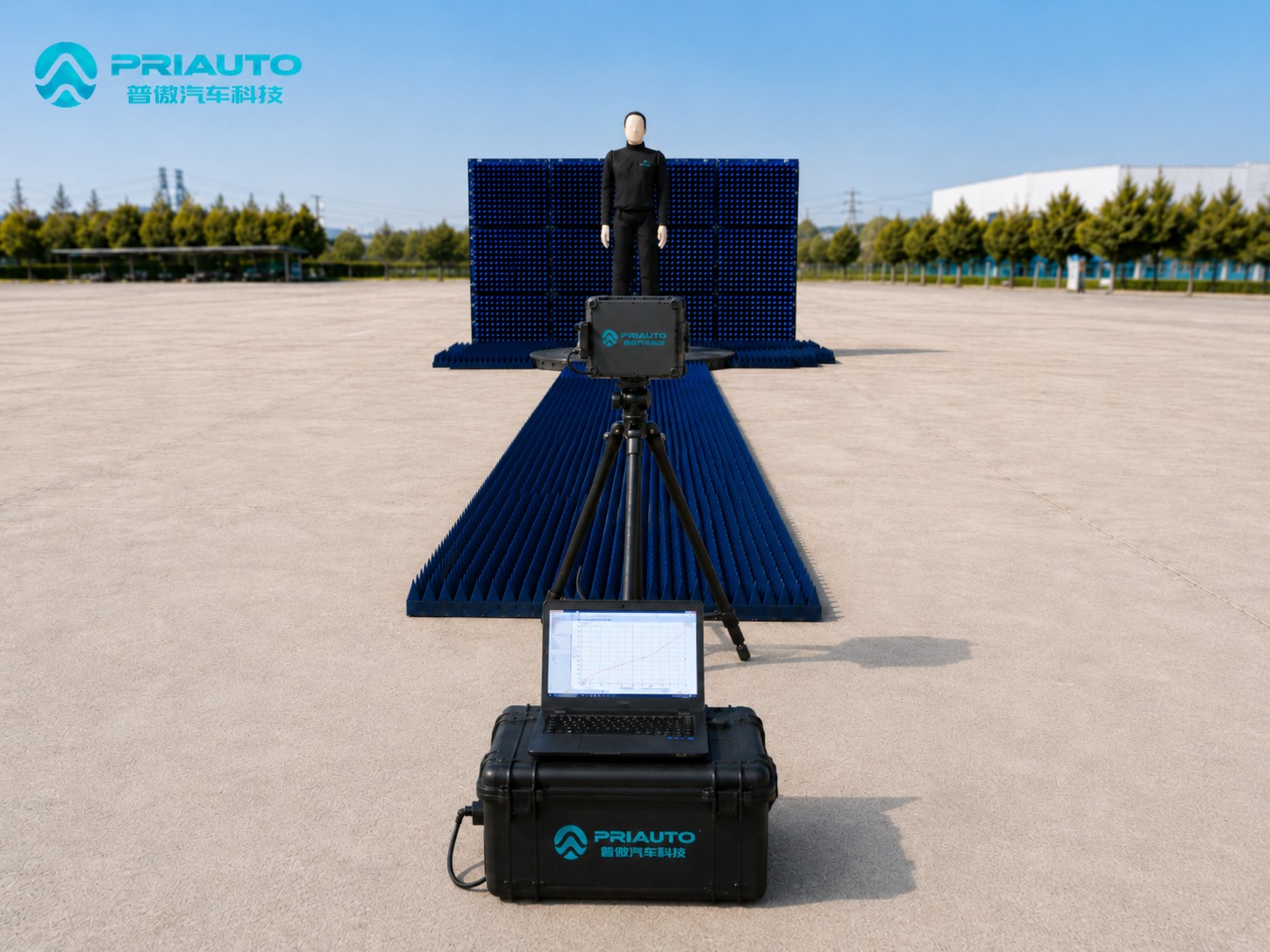
The Система измерения ЭПР радара предназначен для характеризации и верификации радиолокационной заметности (RCS) тестовых мишеней ADAS в условияхконфигурация измерения на фиксированном расстоянии и переменном угле. Он обеспечивает воспроизводимое решение для измерений при оценке радиолокационных характеристик отражения, угловой зависимости и согласованности суррогатных мишеней, используемых при тестировании активной безопасности и автономного вождения.
Во время тестирования расстояние между автомобильным радарным датчиком и целью остается фиксированным. Цель устанавливается на высокоточной поворотной платформе и вращается непрерывно или пошагово в соответствии с предопределенными угловыми интервалами. Ответы радарного эха собираются под разными азимутальными углами, что позволяет генерировать многоугловые кривые ЭПР и извлекать характерные значения ЭПР.
Система применима к пешеходным целям, велосипедистам, мотоциклистам, легковым автомобилям, дорожным ограждениям, объектам на стройплощадках и другим суррогатам дорожных объектов. Она может поддерживать проверку ЭПР тестовых целей ADAS, охватываемых Серия ISO 19206, а также может поддерживать измерение радиолокационной эффективной площади рассеяния, характеризацию угловой зависимости и оценку погрешности измерений, необходимых в процедурах калибровки мишеней, таких какJJF 2322-2025 и JJF 2323-2025.
Конфигурация
Система включает:
- Автомобильный радиолокационный датчик
- Промышленный компьютер для сбора данных
- Высокоточная поворотная платформа
- Конструкция крепления мишени
- Радиопоглощающие материалы
- Программное обеспечение для сбора и анализа радиолокационных данных
- Приспособления для позиционирования и выравнивания
- Дополнительные калибровочные эталонные мишени
- Дополнительный модуль оценки неопределенности измерений
Ключевые особенности
Система использует метод измерения на фиксированном расстоянии и переменном угле. Радиолокационный датчик остается неподвижным, в то время как мишень вращается на поворотной платформе, что позволяет собирать радиолокационные отклики под разными азимутальными углами при постоянных условиях расстояния.
Поворотная платформа обеспечивает точность позиционирования до 0.2°, поддерживая высокоразрешающую характеристику ЭПР под углом и повторяемые многоугловые измерения.
Система поддерживает режимы непрерывного вращения и пошагового углового измерения. Пользователи могут определять угловые интервалы, диапазоны измерений, параметры выборки и процедуры сбора данных в соответствии с различными типами целей и требованиями к тестированию.
Радиопоглощающие материалы используются для снижения помех от отражений окружающей среды и повышения надежности результатов измерений. Конструкция крепления мишени обеспечивает стабильную установку и повторяемое позиционирование различных тестовых мишеней ADAS.
Система может использоваться для:
- Измерение кривой ЭПР под разными углами
- Извлечение характерных значений ЭПР
- Проверка согласованности радиолокационного отражения мишени
- Разработка мишеней и сравнение характеристик
- Поддержка калибровки тестовых целей ADAS
- Оценка погрешности измерений
- Проверка свойств радиолокационного отражения для суррогатных мишеней серии ISO 19206
Технические характеристики
Конфигурация измерений: Измерение ЭПР при фиксированном расстоянии и переменном угле
Режим вращения: Непрерывное вращение или пошаговое угловое позиционирование
Точность углового позиционирования: До 0,2°
Измеряемый объект:Тестовые мишени ADAS и суррогаты дорожных объектов
Применимые типы мишеней:Мишени для пешеходов, мишени для двухколесных транспортных средств, мишени для легковых автомобилей, мишени для ограждений и мишени для дорожных сооружений
Вывод данных: Радиолокационный отклик, кривая угловой зависимости и результаты характеризации ЭПР
Компоненты системы:Автомобильный радар, промышленный компьютер, поворотная платформа, держатель мишени и радиопоглощающие материалы
Применяемые стандарты:Поддерживает верификацию RCS для тестовых мишеней ADAS серии ISO 19206
Поддержка калибровки:Поддерживает требования к измерению RCS и оценке неопределенности, связанные с JJF 2322-2025 и JJF 2323-2025
Типичные применения
- Характеризация ЭПР пешеходных целей
- Измерение ЭПР целей-велосипедистов и мотоциклистов
- Проверка радиолокационного отклика мишеней легковых автомобилей
- Тестирование ЭПР дорожных ограждений и дорожных объектов
- Оценка согласованности углового радиолокационного отражения
- Сравнение целей при разработке продукта
- Калибровка и метрологическая поверка испытательных мишеней ADAS
- Подтверждающие документы соответствия мишени и контроля качества